Marka Autel Robotics nie jest jeszcze w Polsce powszechnie rozpoznawana – brakuje jej wiele do popularności DJI, Yuneec czy innych starych graczy. Czy tak powinno pozostać? Firma Autel swoimi nowymi produktami przekonuje nas, że nie, i, że to nie jest jej ostatnie słowo. Właściwie wygląda na to, że Autel dopiero zaczyna walczyć o klienta – i to klienta profesjonalnego, takiego, dla którego dron jest narzędziem pracy. I dla którego najlepiej byłoby, żeby również te narzędzia były skonstruowane mądrze i w możliwie najlepszej jakości – jak na przykład elektronarzędzia Bosh czy Makita.

ZEWNĘTRZNE PIĘKNO
Zanim jeszcze zdąży dla nas cokolwiek zrobić – nowy Autel EVO 2 Pro czaruje nas wyglądem. Chyba żadna z widzących go po raz pierwszy osób nie zignorowała urody tego modelu – nie bezpodstawnie – i wszystkie jednogłośnie podkreślały: to pierwszy dron, którego obudowę projektował nie księgowy – a designer, z prawdopodobnie włoskim pochodzeniem (nie wiemy tego na pewno, ale tak podejrzewamy…). Autel EVO 2 jest po prostu śliczny. Wzorniczo przypomina niesamowite projekty Jeana Paula Gaultiera, składające się na universum w filmie Piąty Element. Trochę też Żółtą Łódź Podwodną (pomimo tego, że jest pomarańczowy) i nieco… wspomniane już elektronarzędzia. Z frontu spogląda na nas troje oczu (kamera główna i dwie kamery systemu stabilizacji), które zdają się mówić: spokojnie, wiem o co chodzi. Zgrabny tył, zwieńczony dwoma kamerami, jest natomiast bardzo retro i przywodzi na myśl amerykańskie krążowniki szos z lat 60. Z boku – dla mnie to świetnie zaprojektowany toster albo statek kosmiczny z planety Melmak. Więc tu punkt dla Autela – wygląd jego nowego drona zjednuje sobie prawie wszystkich, jeszcze zanim włożymy do niego baterię. Ale czy zewnętrzne piękno niesie ze sobą

PIĘKNO WEWNĘTRZNE?
Muszę przyznać, że mój osąd w tej kwestii
jest nieco „zakrzywiony” siłą zestawu, z jakim miałem okazję sięzapoznać (i zaprzyjaźnić). Dodatkowo w zestawie jest nowy Smart Controller – wzorniczo ścigający się z dronem, dwie szybkie ładowarki, komplet niezbędnych
przewodów i dwa akumulatory. Wszystkie elementy zachowują jednolite wzornictwo i są naprawdę dobrze wykonane. Zmyślny port „na głowie” drona pozwala ekstremalnie łatwo montować wymienione dodatki, albo zakryć się sprytną zaślepką. Producent zadbał nawet o zabezpieczenie złącza każdego z elementów gustowną, gumową osłoną w kolorze orange oczywiście. Całość jest przyjemna w dotyku, perfekcyjnie spasowana i sprawia
naprawdę solidne wrażenie. I świetnie, ale


JAK TO LATA?
Pierwsze słowo, jakie przychodzi mi teraz
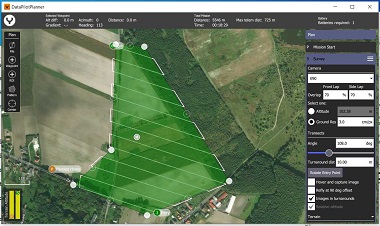
do głowy to „łatwo”. Łatwo jest EVO 2 uruchomić, połączyć z kontrolerem, skalibrować i wystartować. Chyba jeszcze nigdy nie było łatwiej! Słyszałem, że niektórzy użytkownicy mają kłopoty z androidową aplikacją na smartfona, kiedy używają zwykłego, „małego” kontrolera (który też przetestowaliśmy) – ale ja sam, zarówno na Androidzie jak i w iOS, nie napotkałem żadnych kłopotów czy niedociągnięć. Wszystko ze wszystkim połączyło się samo, ściągnęło upgrade firmware i po kilku minutach zgłosiło gotowość. Zatem kolejny solidny punkt dla Autela. A dalej było jeszcze lepiej: skonfigurowanie nalotu fotogrametrycznego, z użyciem RTK, na prostym wycinku mapy w kształcie wielokąta zajęło mi mniej niż minutę. Potem dron zrealizował całą pracę bezbłędnie i wylądował dokładnie w miejscu, z którego wyruszył. Niepokojący był komunikat „SD card abnormal”, wyświetlany w menu podsumowującym sprawność sprzętu – ale nie przełożyło się to na nic więcej. Zdjęcia zostały poprawnie zapisane, plik OBS również. Jednak moja zawodowa ciekawość z pewnością skłoni mnie do
wyjaśnienia tego zjawiska.
OCZY DOOKOŁA GŁOWY
Mnogość kamer to chyba pierwsza, najszybciej zauważalna cecha szczególna Autela EVO. Dron dysponuje… dwunastoma (!!!) kamerami systemu stabilizacji i kamerą główną (w wersji termowizyjnej – podwójną, RGB i termo). Przekłada się to na stabilność i ciągłe powiadomienia o przeszkodach, jeśli mamy je bliżej niż 10 metrów. Trochę obawiałem się testu „lot w ścianę” i nie wykonałem go oczywiście – ale jestem prawie pewny, że dron skutecznie to uniemożliwi. W każdym razie – ma świadomość tego, co dzieje się dokoła i koryguje swój tor lotu z wyprzedzeniem. Kamera główna w testowanej wersji jest dokładnie taka, jak w wersji Pro – jednocalowa matryca 6K generuje bardzo klarowne i szczegółowe obrazy, a w dodatku nie ujawnia żadnych szumów w warunkach dziennego oświetlenia. Z pewnością przetestujemy ją też w warunkach nocnych – ale specyfikacja kamery (czułość 12 800 ISO i 10-bitowa głębia koloru) i jej dobra opinia – ta kamera nie jest instalowana w dronach Autel od dziś – pozwala spodziewać się wszystkiego najlepszego.

A JAK TO WYGLĄDA NA PAPIERZE?
Autel obiecuje kilka rzeczy (szczegóły specyfikacji poszczególnych wersji znajdziecie w sklepie, na kartach produktów), z których najważniejszą jest czas lotu do 42 minut. Przy wietrze rzędu 5m/s, bez akrobacji i wyścigów, testowany dron rzeczywiście tyle latał. Przy szybszym wietrze zapewne nie byłoby tak pięknie – ale na dziś to wynik co najmniej zadowalający. Czy będzie można go poprawić kupując bardziej pojemną baterię – czas pokaże. Raczej nie będzie można zwykłego EVO 2 wyposażyć w karbonowe ramiona i większe silniki, montowane w wersji Enterprise (tak twierdzi na dzień dzisiejszy producent) – więc jeśli ktoś lubi karbonowe dodatki, tak modne dziś w motoryzacji, musi od razu pomyśleć o zestawie Enterprise. Pozostałe istotne parametry drona, jak szybkości pionowe i pozioma, zasięg czy szybkość ładowania nie odstają od dzisiejszej (wyższej) średniej. Dokładność RTK, którą precyzyjnie sprawdzimy niebawem, sprawia wrażenie przynajmniej niezłej. Precyzyjne dane testowe zamieścimy w blogu w najbliższym czasie.
CZY WART ON GRZECHU?
Czy kalkuluje się zdradzić dla niego dotychczas używaną markę? Odpowiem możliwie prosto i bez kokieterii: tak. Urok Autela EVO 2 skłania nas do grzeszenia myślą i czynem. Jego parametry pomagają tę zdradę uzasadnić, a zwyczajna wygoda obsługi pomaga szybko zapomnieć o grzechu. Wydaje się też, że ten dron to precyzyjnie przygotowany i wymierzony atak na pozycje zajmowane już przez inne profesjonalne czterowirnikowce. Czy się powiedzie? Nie wiem. Ale wiem, że będę kibicował temu przedsięwzięciu. Choćby dlatego, że zawsze lubiłem pomarańcze.